Principle of Work and Energy for Rigid Bodies
As stated in the previous section, the Principle of Work and Energy can be boiled down to the idea that the work done to a body will be equal to the change in energy of that body. Dividing energy into kinetic and potential energy pieces as we often do in dynamics problems, we arrive at the following base equation for the principle of work and energy.
| \[W=\Delta KE + \Delta PE\] |
It is important to notice that unlike Newton's Second Law, the above equation is not a vector equation. It does not need to be broken down into components which can simplify the process, however, we only have a single equation and therefore can only solve for a single unknown which can limit the method.
Additionally, readers will see that these are the same base equations that were used for particles. The only difference with rigid bodies will be that there are additional types of work, kinetic energy, and potential energy that can be used in the overall equation.
Solving Work and Energy Problems
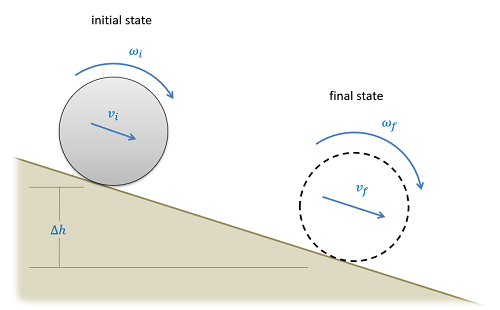
To solve work and energy problems, we will need to first clearly define the initial state and the final state. Drawing a diagram that clearly shows each of these can be a useful first step.
After clearly defining the initial and final states, we will next need to start determining and plugging in the appropriate values to our work and energy equation. Add a work term for any external forces or moments acting on the system between the initial and final states (excluding gravity forces and spring forces). Determine the kinetic energy in the initial state and the final state and plug those into the equation, if there is a change in height plug in gravitational potential energy terms, and finally if there are any springs plug in any elastic potential energy terms.
After plugging in all the terms, you should hopefully have only a single unknown value that you can solve for. If you have more than one unknown, you may need to use kinematics or dependent motion analysis to relate the unknown velocities or displacements that you do have.
After putting all the terms into the work and energy equation and ensuring that there is only a single unknown, you will simply need to use algebra to solve for the unknown in the equation.
Systems of Rigid Bodies
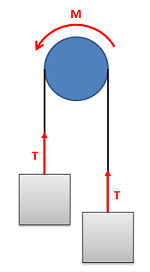
One of the ways to simplify work-energy problems involving multiple connected rigid bodies is to consider all the rigid bodies as one system. As discussed with particles internal forces are not counted in the work done to the system. If we include multiple rigid bodies in our system, then contact forces between the bodies as well as tension forces in cables that connect the bodies become internal forces, and we do not need to calculate the work done by them. The work in the equation will only need to account for external forces.
To use the work and energy principle with a system of particles, we would simply need to use the same equations as before, but ensure that the work is the work due to external forces, and ensure that we account for the kinetic and potential energies of all bodies included in our system.
The Conservation of Energy
Just as with particles, if we have no external forces or moments acting on our system (ignoring gravity and spring forces) then we will have no work done to our system. If we eliminate the work term from the equations above, it will leave us with the following equations.
| \[0=\Delta KE +\Delta PE\] |
| \[KE_i + PE_i =KE_f + PE_f\] |
Since the total energy does not change in these circumstances, these problems are known as conservation of energy problems. They are solved with much the same process as before. We will create a diagram of the initial and final state, determine energies in each of these states, and finally plug those values into our equation and solve for the unknown.